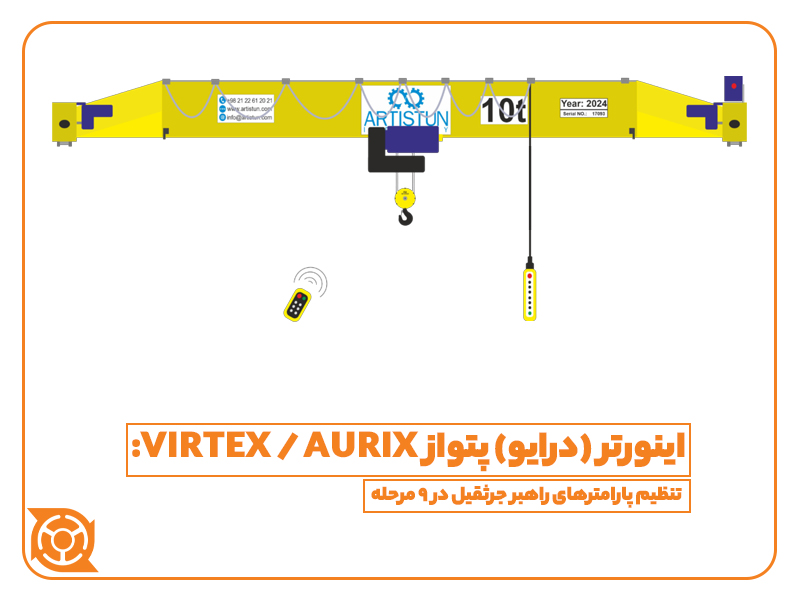
اینورترها به عنوان یکی از اجزاء کلیدی در کنترل و راهاندازی جرثقیلهای سقفی می باشند که نقش مهمی در بهبود عملکرد و دقت این سیستمها ایفا میکنند. جرثقیلهای سقفی از اجزایی مانند پل، کلگی، کالسکه و بالابر تشکیل شدهاند که هماهنگی بین آنها نیازمند تنظیمات دقیق و استفاده از درایوهای پیشرفته است. در این راهنما، مراحل تنظیم پارامترهای اینورتر سری VIRTEX/AURIX برای کنترل جرثقیل سقفی بهطور خلاصه و کاربردی ارائه شده است. با رعایت این دستورالعملها میتوانید عملکرد بهینه و ایمنی سیستم را تضمین کنید.
- پل: پل، تیر باربری است که می تواند طول و عرض ساختمان را طی کند. پل شامل؛ تابلو برق، خطوط برق رسانی و اجزا دیگر می باشد.
- کلگی: این جزء شامل سازه فلزی، چرخ های حرکت طولی، موتورها و ضربه گیر ها می باشد که با حرکت طولی بر روی ریلها، امکان جابهجایی افقی کل مجموعه را فراهم می کند.
- کالسکه (واگن): این جزء وظیفه پشتیبانی از بالابر را دارد و به شکل افقی در امتداد پل جرثقیل حرکت میکند. از این قسمت جهت در موقعیت قرار دادن قلاب و بالابر قبل از بلند کردن یا پایین آوردن بار استفاده میشود.
- بالابر: این قسمت یک سیم بکسل قوی دارد که به قلاب وصل میباشد. به طور کلی بالابر وظیفه بالا بردن، پایین آوردن و نگهداشتن اجسام را دارد.
این راهنما صرفا جهت استفاده از درایو و تنظیم پارامتر های آن برای راهبر جرثقیل شامل کالسکه و یا کلگی است.
در این تنظیمات، فرمان اجرا از طریق ورودی دیجیتال (Digital Input) دریافت شده و موتور بر اساس کنترل برداری بدون سنسور (Sensor-less Vector Control) تنظیم می شود. همچنین، جهت حرکت رو به جلو و یا حرکت در جهت معکوس نیز از ورودی های دیجیتال استفاده می شود.
مراحل تنظیم پارامتر های درایو الکتریکی
- P0-004 = 2 : RUN COMMAND SELECTION (external digital input terminal)
- P6-000 : MOTOR RATED POWER
- P6-001 : MOTOR RATED VOLTAGE
- P6-002 : MOTOR RATED FREQUENCY
- P6-003 : MOTOR RATED SPEED
- P6-004 : MOTOR RATED CURRENT
- P0-002 : MOTOR CONTROL MODE (sensor less vector control)
- P0-005 : SPEED REFERENCE
- P2-001 : ACCELERATION TIME 0
- P2-002 : DECELERATION TIME 0
- P3-001 = 3 : X1 INPUT FUNCTION (FWD)
- P3-002 = 4 : X2 INPUT FUNCTION (REV)
- P3-016 : TWO-WIRE / THREE-WIRE CONTROL MODE SELECTION
- P0-012 : MAXIMUM SPEED
- P0-013 : MINIMUM SPEED

در ادامه جهت تنظیم پارامتر ها نیاز است که تمامی مراحل را با دقت انجام دهید.
1. در ابتدا باید توجه داشته باشید که جهت تنظیم پارامتر ها نیاز است تا ابتدا وارد منو پارامترها (Parameters) شوید.

- با فشردن دکمه PRG وارد منو تنظیمات شوید.
- از لیست موجود با فشردن دکمه PRG وارد بخش پارامتر ها شوید. در ادامه می توانید جهت ورود به پارامتر مورد نظر خود اقدام کنید.
توجه:
1- دقت کنید که دکمه PRG عمل ENTER را نیز انجام می دهد و شما جهت ورود به هر بخش و یا ذخیره مقدار تنظیم شده، می بایست از این دکمه استفاده کنید.
2- در تمامی مراحل می توانید با استفاده از دکمه های بالا و پایین در صفحه تنظیمات جا به جا شده و یا مقدار مورد نظر را افزایش و یا کاهش دهید.
3- جهت بازگشت به مراحل قبل می توانید از دکمه ESC استفاده کنید.
2. تنظیم روش صدور فرمان راه اندازی (Run Command Selection)
برای تنظیم روش صدور فرمان نیاز است تا پارامتر P0-004 را روی مقدار 2 قرار دهید تا فرمان راه اندازی از طریق ورودی دیجیتال خارجی (External Digital Input Terminal) دریافت شود.
جهت کنترل راهبر جرثقیل سقفی از ریموت کنترل استفاده می شود که این ریموت ها می توانند توسط برد مخصوص به خود که به ورودی دیجیتال درایو متصل می شود، فرمان حرکت در جهت جلو و در جهت معکوس را صادر کنند. در زیر دو نمونه از ریموت کنترل ها را مشاهده می کنید.

3.تنظیم مشخصات موتور (Motor Parameters)
جهت عملکرد بهینه و برای اطمینان از هماهنگی درایو با موتور، پارامتر های نامی موتور را مطابق مشخصات روی پلاک موتور تنظیم کنید.
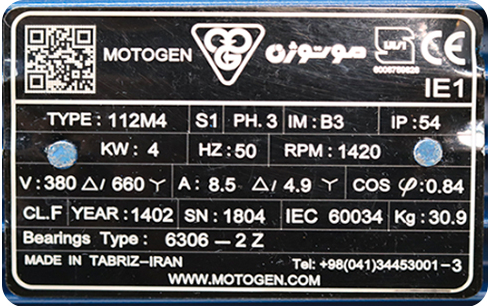
P6-000: توان نامی موتور (Motor Rated Power)
مقدار توان موتور بر حسب کیلووات (در تصویر بالا موتور 4 کیلووات می باشد)
P6-001: ولتاژ نامی موتور (Motor Rated Voltage)
مقدار ولتاژ موتور بر حسب ولت (همانطور که در تصویر بالا مشاهده می شود، مقدار ولتاژ در حالت ستاره 660 ولت و در حالت مثلث 380 ولت می باشد)
P6-002: فرکانس نامی موتور (Motor Rated Frequency)
معمولا 50 یا 60 هرتز بر اساس مشخصات موتور (در تصویر بالا فرکانس 50 هرتز می باشد)
P6-003: سرعت نامی موتور (Motor Rated Speed)
مقدار سرعت نامی موتور بر حسب RPM (در تصویر بالا سرعت نامی 1420 می باشد)
P6-004: جریان نامی موتور (Motor Rated Current)
مقدار جریان با توجه به مشخصات روی پلاک موتور (همانطور که در تصویر بالا مشاهده می شود، مقدار جریان در حالت ستاره 4.9 آمپر و در حالت مثلث 8.5 آمپر می باشد)
توجه: به طور معمول موتور در حالت 380 ولت و 8.5 آمپر در نظر گرفته می شود.
4.تنظیم و تعیین حالت کنترلی موتور (Motor Control Mode)
- مقدار پارامتر P0-002 را روی حالت Sensor-less Vector Control تنظیم کنید تا درایو در حالت کنترل برداری بدون سنسور عمل کند.
P0-002 = 1: Synchronous motor sensor less vector control (کنترل برداری بدون سنسور موتور سنکرون)
P0-002 = 4: Asynchronous motor sensor less voltage vector control (کنترل برداری ولتاژ بدون سنسور موتور آسنکرون)
P0-002 = 5: Asynchronous motor sensor less current vector control (کنترل برداری جریان بدون سنسور موتور آسنکرون)
توجه: می توان از حالت V/F نیز استفاده کرد اما برای عملکرد بهینه درایو و موتورالکتریکی پیشنهاد می شود تا از حالت کنترل برداری بدون سنسور استفاده شود.
نکته: در صورت استفاده از حالت V/F امکان دارد موتور نتواند گشتاور مناسبی تولید کند و درایو با خطا مواجه شود. در این حالت می توانید از فرکانس کات آف Torque boost cut−off frequency و درصد بوست Low frequency torque boost استفاده کنید.
- P7-001: مقدار درصد می تواند متناسب با نیاز پروژه تنظیم شود. (مقدار پیشنهادی 10% می باشد.)
- P7-002: مقدار فرکانس کات آف بوست گشتاور، به صورت پیش فرض 10 هرتز می باشد که مقدار مناسبی است. در صورت نیاز می توانید مقدار را تغییر دهید.
5.تنظیم مرجع سرعت (Speed Reference Selection)
مقدار P0-005 را متناسب با نوع کاربرد تنظیم کنید تا مرجع سرعت به درستی اعمال شود. سرعت درایو می تواند متناسب با نوع کاربرد از مرجع های مختلف مانند صفحه کلید / کیپد Keypad، مودباس Modbus، ورودی آنالوگ Analog Input و … تنظیم شود. به صورت پیشفرض درایو فرمان افزایش و کاهش سرعت را از کیپد دریافت می کند که برای تنظیم جرثقیل نیز تغییر سرعت از روی کیپد پیشنهاد می شود.
6.تنظیم زمان های شتاب و کاهش سرعت / شیب راه اندازی
جهت عملکرد صحیح راهبر جرثقیل سقفی نیاز است تا زمان افزایش و کاهش سرعت به درستی و متناسب با نیاز پروژه تنظیم شود.
P2-001: زمان افزایش سرعت 0 (Acceleration Time 0)
زمان مورد نیاز برای افزایش سرعت موتور از صفر تا حداکثر سرعت (بر حسب ثانیه)
مقدار پیشنهادی بین 2 الی 3 ثانیه می باشد.
P2-002: زمان کاهش سرعت 0 (Deceleration Time 0)
زمان مورد نیاز برای کاهش سرعت موتور از حداکثر سرعت تا صفر (بر حسب ثانیه)
مقدار پیشنهادی بین 2 الی 3 ثانیه می باشد.
7.تنظیم ورودی های دیجیتال برای حرکت در جهت جلو و یا در جهت معکوس (راستگرد / چپگرد)
P3-001: تعیین عملکرد ورودی X1 برای حرکت در جهت رو به جلو (Forward)
X1 Digital Input Function
این مقدار باید روی عدد 3 تنظیم شود.
P3-002: تعیین عملکرد ورودی X2 برای حرکت در جهت معکوس (Reverse)
X2 Digital Input Function
این مقدار باید روی عدد 4 تنظیم شود.
8.انتخاب حالت کنترل دو سیم و یا سه سیم (Two Wire / Three Wire Control Mode Selection)
جهت انتخاب حالت دو سیم Two wire و یا سه سیم Three Wire نیاز است تا مقدار پارامتر P3-016 را متناسب با نیاز پروژه روی عدد صحیح تنظیم کنید.
توجه: در نظر داشته باشید در صورت انتخاب حالت سه سیم می بایست ورودی دیجیتال X3 را نیز فعال کرده و مقدار آن را روی عدد 33 تنظیم کنید.
کنترل دو سیم: این حالت، حالت لحظه ای می باشد.
کنترل سه سیم: این حالت، حالت دائم کار می باشد.
9.تنظیم محدوده سرعت موتور / فرکانس موتور
P0-012: حداکثر سرعت مجاز / سرعت ماکزیمم (Maximum Speed)
مقدار حداکثر سرعت به صورت پیش فرض 50 هرتز است که با توجه به نیاز پروژه می توان آن را تغییر داد.
P0-013: حداقل سرعت مجاز / سرعت مینیمم (Minimum Speed)
مقدار حداقل سرعت به صورت پیش فرض 0 هرتز است که با توجه به نیاز پروژه می توان آن را تغییر داد.
توجه: با انجام مراحل ذکر شده در بالا درایو الکتریکی پتواز سری VIRTEX / AURIX به درستی برای کنترل راهبر جرثقیل سقفی پیکربندی خواهند شد. رعایت موارد ذکر شده، عملکرد بهینه و ایمنی سیستم را تضمین می کند.
نکته: در صورت نیاز به تغییرات خاص، می توان پارامتر ها را متناسب با شرایط کاری و نیاز پروژه تنظیم کرد.
توجه
جهت تنظیم پارامتر های بالابر جرثقیل از طریق لینک اقدام نمایید.
جمع بندی
- این تنظیمات جهت کنترل راهبر جرثقیل سقفی با قابلیت حرکت در جهت جلو و حرکت در جهت معکوس ارائه شده است.
- کنترل برداری بدون سنسور جهت بهبود عملکرد موتور پیشنهاد شده است.
- پس از انجام تمامی مراحل ذکر شده، جهت اطمینان از عملکرد صحیح موتور، نیاز به تست درایو می باشد. تست های لازم شامل حرکت در جهت جلو، حرکت در جهت معکوس، راه اندازی جرثقیل تحت بار و بدون بار می باشد.
نکات ایمنی
- هنگامی که برق دستگاه متصل است به ترمینال های درایو دست نزنید، زیرا خطر برق گرفتگی وجود دارد.
- قبل از برداشتن کاور دستگاه، مطمئن شوید که برق ورودی متصل به منبع تغذیه را قطع کردید.
- قبل از تعمیر، نگهداری و بازرسی حداقل 10 دقیقه پس از قطع برق صبر کنید تا خازن ها دشارژ شوند. سپس اطمینان حاصل کنید که نشانگر CHARGE خاموش است تا از آسیب رساندن به افراد جلوگیری شود.
هشدار ها
- برق سه فاز ورودی را نمی توان به پایانه های خروجی U، V، W وصل کرد.
- حتما چک کنید که تعداد فازهای برق و ولتاژ ورودی با پلاک مشخصات نامی درایو مطابقت داشته باشد.
- برای اتصال کابل اصلی قدرت به ترمینال های درایو از کابلشو با روکش عایق استفاده کنید.
پشتیبانی
در صورت نیاز و بروز هر گونه مشکل، با واحد فنی شرکت پتواز تماس حاصل فرمایید.
شماره تماس و پیام رسان های پشتیبانی واحد فنی : 09045952007
سپاس از همراهی شما
واحد پشتیبانی فنی و خدمات پس از فروش
شرکت یکسوسازان توان پتواز


