
مقدمه
در بسیاری از کاربردهای صنعتی، از جمله سیستمهای آبرسانی تحت فشار ثابت یا کمپرسورهای هوای فشرده، کنترل دقیق و پایدار فشار نقش کلیدی در بهینهسازی عملکرد تجهیزات، افزایش بهرهوری انرژی و کاهش استهلاک مکانیکی دارد. یکی از رایجترین و موثرترین روشها برای دستیابی به فشار ثابت در این سیستمها، استفاده از درایوهای الکتریکی با قابلیت کنترل PID میباشد.
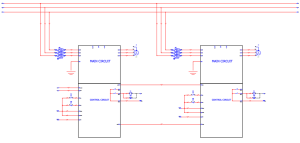
در این سیستمها، موتورهای اصلی به دو گروه MASTER و SLAVE تقسیم شدهاند. درایو MASTER به عنوان واحد کنترل اصلی با استفاده از منبع فرکانس PID، فرمان سرعت و فشار را دریافت و پردازش میکند، در حالی که درایو SLAVE بر اساس ورودی آنالوگ (AI1) و تنظیمات مشابه، هماهنگ با MASTER عمل میکند. تنظیمات پارامترهای کلیدی از جمله فرکانس ماکزیمم و حد پایین، زمان شتاب و کاهش سرعت، انتخاب منبع فرمان ترمینال، و تنظیمات منحنیهای آنالوگ (AI Curve) باعث میشود که موتورها به صورت نرم و هماهنگ راهاندازی شده و فشار سیستم به شکل پایدار و یکنواخت کنترل شود.
علاوه بر این، استفاده از رلههای خروجی برای نمایش وضعیت روشن بودن درایو و امکان مشاهده و کنترل فرکانس خروجی از طریق آنالوگ، قابلیت پایش و مدیریت عملیاتی سیستم را بهبود میبخشد. تنظیمات دقیق PID شامل ضریب تناسبی (KP)، زمان انتگرال (Ti) و زمان مشتق (Td) نیز تضمین میکند که تغییرات فشار با سرعت مناسب و بدون نوسان شدید اعمال شده و سیستم در شرایط پیک بار یا کاهش ناگهانی مصرف، عملکرد پایدار و مطمئنی داشته باشد.
با ترکیب تنظیمات دقیق پارامترهای MASTER و SLAVE، کنترل V/F و منحنیهای آنالوگ، این سیستم قادر است فشار ثابت و عملکرد بهینه تجهیزات را به طور همزمان تضمین کند، انرژی را صرفهجویی نماید و طول عمر مکانیکی تجهیزات را افزایش دهد.

پارامتر های تنظیم شده
- MASTER
- P0-00 = 2: GP type (P)
- P0-01 = 2: Speed Control Mode Selection (V/F control)
- P0-02 = 1: Run Command Source Selection (Terminal Command Chanel)
- P0-03 = 8: Main Frequency Source X Selection (PID)
- P0-10 = 50: Maximum Frequency
- P0-14 = 30-35: Frequency Lower Limit
- P0-17 = 15: Acceleration Time 0
- P0-18 = 15: Deceleration Time 0
- P1-01: Motor Rated Power
- P1-02: Motor Rated Voltage
- P1-03: Motor Rated Current
- P1-04: Motor Rated Frequency
- P1-05: Motor Rated Speed
- P4-00 = 1: X1 Terminal Function Selection (Forward Run)
- P4-01 = 2: X2 Terminal Function Selection (Reverse Run)
- P4-02 = 3: X3 Terminal Function Selection (Three-Line Control)
- P4-03 = 47: X4 Terminal Function Selection (Emergency Stop)
- P4-11 = 2: Terminal Command Mode (Three-Wire Mode 1)
- P4-18 = 0: AI Curve 2 Minimum input
- P4-19 = 0: AI Curve 2 Minimum input corresponding Value
- P4-20 = 10: AI Curve 2 Maximum input
- P4-21 = 100: AI Curve 2 Maximum input corresponding Value
- P5-02 = 1: Relay Output Function Selection (Inverter Running)
- P5-07 = 0: AO Output Function Selection (Running frequency)
- P5-10 = 0: AO Zero Offset Coefficient
- P5-11 = 1: AO Gain
- P6-10 = 1: Stop Mode (Coast to Stop)
- P9-00 = 1: Motor Overload Protection Selection
- P9-01 = 0.2: Motor Overload Protection Gain
- PA-00 = 0: PID Setting Source (PA-01 set)
- PA-01 = 65: PID Digital Setting
- PA-02 = 1: PID Feedback Source
- PA-05 = 60: Proportional Gain KP1
- PA-06 = 0.01: Integration Time Ti1
- PA-07 = 5: Derivative Time
- SLAVE
- P0-00 = 2: GP type (P)
- P0-01 = 2: Speed Control Mode Selection (V/F control)
- P0-02 = 1: Run Command Source Selection (Terminal Command Chanel)
- P0-03 = 2: Main Frequency Source X Selection (AI1)
- P0-10 = 50: Maximum Frequency
- P0-14 = 30-35: Frequency Lower Limit
- P0-17 = 15: Acceleration Time 0
- P0-18 = 15: Deceleration Time 0
- P1-01: Motor Rated Power
- P1-02: Motor Rated Voltage
- P1-03: Motor Rated Current
- P1-04: Motor Rated Frequency
- P1-05: Motor Rated Speed
- P4-00 = 1: X1 Terminal Function Selection (Forward Run)
- P4-01 = 2: X2 Terminal Function Selection (Reverse Run)
- P4-02 = 3: X3 Terminal Function Selection (Three-Line Control)
- P4-03 = 47: X4 Terminal Function Selection (Emergency Stop)
- P4-11 = 2: Terminal Command Mode (Three-Wire Mode 1)
- P4-13 = 0: AI Curve 1 Minimum Input
- P4-14 = 0: AI Curve 1 Minimum Input Corresponding Value
- P4-15 = 10: AI Curve 1 Maximum Input
- P4-16 = 100: AI Curve 1 Maximum Input Corresponding Value
- P5-02 = 1: Relay Output Function Selection (Inverter Running)
- P6-10 = 1: Stop Mode (Coast to Stop)
- P9-00 = 1: Motor Overload Protection Selection
- P9-01 = 0.2: Motor Overload Protection Gain
در ادامه پارامتر هایی که در هر دو حالت Master و Slave یکسان هستند را مشاهده خواهید:
1.در ابتدا باید توجه داشته باشید که جهت تنظیم پارامتر ها نیاز است تا ابتدا وارد منو پارامترها (Parameters) شوید.

- با فشردن دکمه PRG وارد منو تنظیمات شوید.
توجه:
- شما جهت ورود به هر بخش و یا ذخیره مقدار تنظیم شده، می بایست از دکمه ENTER استفاده کنید.
- در تمامی مراحل می توانید با استفاده از دکمه های بالا و پایین در صفحه تنظیمات جا به جا شده و یا مقدار مورد نظر را افزایش و یا کاهش دهید.
- جهت بازگشت به مراحل قبل می توانید از دکمه PRG/ESC استفاده کنید.
نکته:
قبل از شروع پارامتردهی پیشنهاد می شود تا یک بار ریست فکتوری انجام شود. این عمل با قرار دادن مقدار پارامتر PP-01 روی عدد 1 انجام می شود.
همچنین در این دستورالعمل مقدار پارامتر P0-00 برای هر دو درایو روی عدد 2 تنظیم شده تا حفاظت اضافه بار سریع تر اعمال شود.
- تنظیم و تعیین حالت کنترلی موتور (Motor Control Mode)
با تنظیم پارامتر P0-01 روی عدد مناسب می توانید حالت کنترلی مورد نظر خود را انتخاب کنید.
- 0: کنترل برداری بدون سنسور سرعت (SVC)
- 1: کنترل برداری با سنسور (FVC)
- 2: کنترل V/F
نکته: در این دستورالعمل این مقدار در هر دو درایو روی عدد 2 تنظیم شده است.
- تنظیم روش صدور فرمان راه اندازی (Run Command Selection)
برای تنظیم روش صدور فرمان نیاز است تا پارامتر P0-02 را روی مقدار مقدار مناسب قرار دهید تا فرمان راه اندازی به درستی دریافت شود.
- 0: کانال فرمان پنل عملیات (LED خاموش)
- 1: کانال فرمان ترمینال (LED روشن)
- 2: کانال فرمان ارتباطی (LED چشمک زن)
نکته: در این دستورالعمل این مقدار در هر دو درایو روی عدد 1 تنظیم شده است تا فرمان از طریق پوش باتن (شاسی های استارت و استاپ) روی درب تابلو صورت گیرد.
- تنظیم مشخصات موتور (Motor Parameters)
جهت عملکرد بهینه و برای اطمینان از هماهنگی درایو با موتور، پارامتر های نامی موتور را مطابق مشخصات روی پلاک موتور تنظیم کنید.
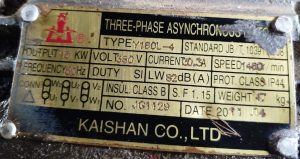
P1-01: توان نامی موتور (Motor Rated Power)
مقدار توان موتور بر حسب کیلو وات ( در تصویر بالا موتور 15 کیلو وات می باشد)
P1-02: ولتاژ نامی موتور (Motor Rated Voltage)
مقدار ولتاژ موتور بر حسب ولت 380 می باشد.
P1-03: جریان نامی موتور (Motor Rated Current)
مقدار جریان با توجه به مشخصات روی پلاک موتور 30.3 آمپر می باشد.
P1-04: فرکانس نامی موتور (Motor Rated Frequency)
معمولا 50 یا 60 هرتز بر اساس مشخصات موتور ( در تصویر بالا فرکانس 50 هرتز می باشد)
P1-05: سرعت نامی موتور (Motor Rated Speed)
مقدار سرعت نامی موتور بر حسب RPM ( در تصویر بالا سرعت نامی موتور 1480 می باشد)
- تنظیم مرجع سرعت (Speed Reference Selection)
مقدار P0-03 را متناسب با نوع کاربرد تنظیم کنید تا مرجع سرعت به درستی اعمال شود. سرعت درایو می تواند متناسب با نوع کاربرد از مرجع های مختلف مانند، صفحه کلید / کیپد Keypad، مودباس Modbus، ورودی آنالوگ Analog Input و … تنظیم شود. به صورت پیشفرض درایو فرمان افزایش و کاهش سرعت را از کیپد دریافت می کند.
- 0: تنظیم دیجیتال (داده ها هنگام قطع برق پاک می شوند)
- 1: تنظیم دیجیتال (داده ها هنگام قطع برق ذخیره می شوند)
- 2 : AI1
- 3 : AI2
- 4 : پتانسیومتر کیپد
- 5: تنظیم پالس PULSE (X5)
- 6: دستورات چندگانه
- 7PLC: ساده
- 8 PID:
- 9 : ارتباطات
نکته: در این دستورالعمل این مقدار برای درایو Master روی عدد 8 تنظیم شده تا فرمان سرعت از PID دریافت شود و برای درایو Slave روی عدد 2 تنظیم شده تا فرمان سرعت از طریق ورودی آنالوگ 1 اعمال شود.
- تنظیم محدوده سرعت موتور / فرکانس موتور
P0-10: حداکثر سرعت مجاز / سرعت ماکزیمم (Maximum Speed)
مقدار حداکثر سرعت به صورت پیش فرض 50 هرتز است که با توجه به نیاز پروژه می توان آن را تغییر داد.
P0-14: حداقل سرعت مجاز / سرعت مینیمم (Minimum Speed)
مقدار حداقل سرعت به صورت پیش فرض 0 هرتز است که می توانید متناسب با نیاز پروژه تغییر دهید.
نکته: در این دستورالعمل مقادیر سرعت مینیمم در هر دو درایو می تواند روی عدد 30 یا 35 تنظیم شود (وابسته به نیاز پروژه).
- تنظیم زمان های شتاب و کاهش سرعت / شیب راه اندازی
جهت عملکرد صحیح موتور نیاز است تا زمان افزایش و کاهش سرعت به درستی و متناسب با نیاز پروژه تنظیم شود.
P0-17: زمان افزایش سرعت / شتاب 0 (Acceleration Time 0)
زمان مورد نیاز برای افزایش سرعت موتور از صفر تا حداکثر سرعت (بر حسب ثانیه)
باید با توجه به نیاز پروژه تنظیم شود.
P0-18: زمان کاهش سرعت 0 (Deceleration Time 0)
زمان مورد نیاز برای کاهش سرعت موتور از حداکثر سرعت تا صفر (بر حسب ثانیه)
باید با توجه به نیاز پروژه تنظیم شود.
نکته: در این دستورالعمل این مقادیر در هر دو درایو، 15 ثانیه تنظیم شده اند تا درایوها به آرامی و خیلی نرم راه اندازی شوند.
- تنظیم ورودی های دیجیتال برای شروع/ توقف

P4-00: تعیین عملکرد ورودی X1 جهت فرمان حرکت رو به جلو / فوروارد (Forward)
X1 Terminal function Selection (Forward Running)
این مقدار باید روی عدد 1 تنظیم شود.
P4-01: تعیین عملکرد ورودی X2 جهت فرمان حرکت معکوس / ریورس (Reverse)
X2 Terminal function Selection (Reverse Running)
این مقدار باید روی عدد 2 تنظیم شود. (در این دستورالعمل این ترمینال نیاز نمی باشد و رزرو است)
P4-02: تعیین عملکرد ورودی X3 جهت فعال کردن حالت سه سیم
X3 Terminal function Selection (Three wire)
این مقدار باید روی عدد 3 تنظیم شود.
P4-03: تعیین عملکرد ورودی X4 برای فعال کردن توقف اضطراری (Emergency stop)
X4 Digital Input Function
این مقدار باید روی عدد 47 تنظیم شود. (این ورودی دیجیتال توسط پرشر سوئیچ موجود در پروژه فعال و غیر فعال می شود.)
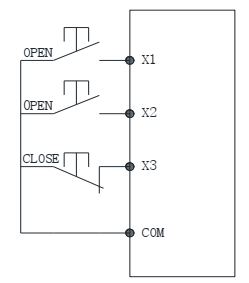
- انتخاب حالت کنترل دو سیم و یا سه سیم (Two Wire / Three Wire Control Mode Selection)
جهت انتخاب حالت دو سیم Two wire و یا سه سیم Three Wire نیاز است تا مقدار پارامتر P4-11 را متناسب با نیاز پروژه روی عدد صحیح تنظیم کنید.
توجه: در نظر داشته باشید در صورت انتخاب حالت سه سیم می بایست ورودی دیجیتال X3 را نیز فعال کرده و مقدار آن را روی عدد 3 تنظیم کنید. در حالت دو سیم نیازی به تنظیم این پارامتر نمی باشد.
کنترل دو سیم: این حالت، حالت لحظه ای می باشد.
کنترل سه سیم: این حالت، حالت دائم کار می باشد.
- :0 حالت دو سیم 1
- :1 حالت دو سیم 2
- :2 حالت سه سیم 1
- 3:حالت سه سیم 2
نکته: دراین دستورالعمل مقدار این پارامتر به دلیل وجود پوش باتن روی درب تابلو روی عدد 2 تنظیم شده است.
- تنظیم نحوه توقف موتور
P6-10: حالت توقف موتور (Stop Mode)
در هر دو درایو با تنظیم این پارامتر بر روی مقدار 1، در زمان دریافت فرمان توقف، خروجی درایو بلافاصله قطع شده و موتور بدون هیچگونه کنترل یا کاهش سرعت تدریجی، صرفاً با تکیه بر اینرسی مکانیکی خود از حرکت بازمیایستد. به این نوع توقف، توقف آزاد یا رهاسازی به توقف گفته میشود. (به عبارتی موتور خلاص می شود.)
- تنظیم نحوه عملکرد رله جهت فعال کردن چراغ سیگنال روی درب و شیر برقی ها به محض روشن شدن درایو

P5-02: انتخاب عملکرد رله 1 (Relay Output Function Selection)
در هر دو درایو با تنظیم مقدار این پارامتر روی عدد 3، این پارامتر تعیین می کند که رله به عنوان خروجی چراغ سیگنال ها و شیر برقی ها عمل کند. هنگامی که فرمان استارت به درایو ارسال می شود، شیر برقی ها و چراغ سیگنال ها نیز فعال می شوند و به محض ارسال فرمان استاپ آن ها نیز غیر فعال می شوند.
در این قسمت رله های خروجی ROA , ROC استفاده شده است.
- حفاظت اضافه بار
جهت حافظت اضافه بار نیاز است تا ابتدا درایو طوری تنظیم شود که این حفاظت در آن فعال باشد و سپس مقدار حافظتی که تعریف شده را اعمال کند.
P9-00: انتخاب حالت عملکرد حفاظت اضافه بار (Motor Overload Protection Selection)
با تنظیم مقدار این پارامتر در هر دو درایو روی عدد 1 حفاظت اضافه بار فعال می شود.
P9-01: گین حفاظت اضافه بار موتور (Motor Overload Protection Gain)
مقدار این پارامتر با توجه به نیاز پروژه و حفاظت مورد نظر تنظیم می شود. معمولا مقدار این پارامتر روی %120 تنظیم می شود.
پارامترهای مربوط به PID در درایو Master
توجه: پارامترها در گروه PA زمانی موثر هستند که P0-03 = 8 [PID].
PA-00: انتخاب مرجع اصلی PID (PID Setting Source)
این پارامتر، انتخاب منبع مرجع اصلی را تعریف می کند.
0= تنظیم پارامتر (PA−01)
1= AI1
2= AI2
3= AI3 (Panel Potentiometer)
Pulse Setting =4
Communication Given =5
Multi-Speed Given =6
در این تنظیم، مقدار این پارامتر روی عدد صفر تنظیم شده تا مرجع اصلی کنترلر از روی پارامتر PA-01 خوانده شود.
PA-01: تنظیم PID دیجیتال (PID Digital Setting)
مقدار مرجع PID را زمانی که PA−00 = 0 باشد، تعریف می کند.
100.00 %= 100.00% مقدار فیدبک
در اینجا با توجه به شرایط ذکر شده در پروژه، مقدار این پارامتر روی عدد 65 درصد تنظیم شده است.
PA-02: انتخاب فیدبک اصلی PID (PID feedback Source)
انتخاب منبع فیدبک اصلی را تعریف می کند.
در این تنظیم، مقدار این پارامتر روی عدد 1 تنظیم شده تا فیدبک اصلی کنترلر از ورودی آنالوگ 2 خوانده شود. در صورت نیاز می توانید از دیگر منابع فیدبک نیز استفاده کنید.
:PA-05 بهره متناسب KP1
Proportional gain P1
خروجی قسمت بهره متناسب PID Pout = Kp * ε.
این پارامتر میزان واکنش درایو به خطا (اختلاف بین مقدار واقعی و مرجع) را تعیین می کند. هرچه مقدار بالاتر باشد، واکنش سریع تر ولی ناپایدارتر خواهد بود. ( مقدار این پارامتر می بایست با آزمون و خطا و با توجه به شرایط کاری تنظیم شود.)
در این پروژه این مقدار روی عدد 60% تنظیم شده است.
PA-06: زمان انتگرال Ti1
Integration time Ti1
خروجی قسمت انتگرال PID Iout = Kp * 1/Ti * ∑ε.
زمان انتگرالی بر حسب ثانیه، مقدار زمان لازم برای حذف خطای پایدار را تنظیم می کند. هرچه زمان انتگرال کوتاهتر باشد، مقدار خطای پیوسته سریعتر تصحیح می شود. زمان انتگرال بسیار کوتاه، کنترل را ناپایدار می کند.( مقدار این پارامتر می بایست با آزمون و خطا و با توجه به شرایط کاری تنظیم شود.)
در این پروژه این مقدار روی عدد 0.01 تنظیم شده است.
: PA-07 زمان مشتق
Derivative time
خروجی قسمت مشتق PID Dout = Td * (ε – ε`).
در صورت تغییر مقدار خطا، عملکرد مشتق، خروجی کنترلر PID را افزایش می دهد. هرچه زمان مشتق بیشتر باشد، خروجی کنترلر PID در طول تغییر بیشتر تقویت می شود. این ویژگی برای کنترل دقیق تر و کاهش تاثیر اختلالات در سیستم های دینامیکی اهمیت دارد. ( مقدار این پارامتر می بایست با آزمون و خطا و با توجه به شرایط کاری تنظیم شود.)
در این پروژه این مقدار روی عدد 5 تنظیم شده است.
پارامترهای مربوط به AI2 در درایو Master
جهت استفاده از این پارامتر ها در حالتی که سنسور جریانی می باشد نیاز است تا حالت جامپر روی برد را تغییر دهید.
P4-18: حداقل مقدار سیگنال ورودی آنالوگ 2 (AI Curve 2 Minimum input)
حداقل مقدار سیگنال ورودی آنالوگ که توسط درایو شناسایی میشود. این مقدار مبنای نقطه شروع منحنی کنترل است.
در این پروژه این مقدار روی عدد 0 تنظیم شده است.
P4-19: مقدار خروجی متناظر با حداقل ورودی آنالوگ 2 (AI Curve 2 Minimum input corresponding Value)
مقدار خروجی متناظر با حداقل ورودی آنالوگ، معمولاً برابر صفر درصد فرکانس خروجی است تا سیستم در مقدار کمترین سیگنال، موتور را در حالت توقف یا حداقل سرعت نگه دارد.
در این پروژه این مقدار روی عدد 0 تنظیم شده است.
P4-20: حداکثر مقدار سیگنال ورودی آنالوگ 2 (AI Curve 2 Maximum input)
حداکثر مقدار سیگنال ورودی آنالوگ که درایو شناسایی میکند. این نقطه، سقف محدوده کنترل فرکانس است.
در این پروژه این مقدار روی عدد 10 تنظیم شده است.
P4-21: مقدار خروجی متناظر با حداکثر ورودی آنالوگ 2 (AI Curve 2 Maximum input corresponding Value)
مقدار خروجی متناظر با حداکثر ورودی آنالوگ، معمولاً برابر صد درصد فرکانس ماکزیمم است، تا درایو بتواند با افزایش ورودی آنالوگ، فرکانس موتور را به حداکثر مقدار تنظیمشده برساند.
در این پروژه این مقدار روی عدد 100 تنظیم شده است.
پارامترهای مربوط به AO در درایو Master
P5-07: انتخاب عملکرد خروجی آنالوگ (AO Output Function Selection)
این پارامتر مشخص میکند که خروجی آنالوگ به چه منظوری استفاده شود. مقدار 0 نشان میدهد که خروجی AO برای نمایش فرکانس واقعی موتور اختصاص داده شده است، یعنی ولتاژ خروجی آنالوگ متناسب با فرکانس در حال اجرا (Running Frequency) موتور خواهد بود.در این پروژه این مقدار روی عدد 0 تنظیم شده است.
در این پروژه این مقدار روی عدد 0 تنظیم شده است.
P5-10: آفست نقطه صفر خروجی آنالوگ (AO Zero Offset Coefficient)
این ضریب برای اصلاح نقطه صفر خروجی آنالوگ کاربرد دارد. مقدار صفر به این معنی است که هیچ جابجایی (Offset) به سیگنال اعمال نمیشود و ولتاژ خروجی AO دقیقاً از صفر شروع میشود، که به پایش دقیق فرکانس کمک میکند.
در این پروژه این مقدار روی عدد 0 تنظیم شده است.
P5-11: ضریب تقویت خروجی آنالوگ (AO Gain)
این پارامتر ضریب تقویت خروجی آنالوگ را تعیین میکند. مقدار 1 یعنی سیگنال خروجی AO به طور مستقیم و بدون تغییر تقویت نسبت به سیگنال واقعی فرکانس موتور منتقل میشود. این تنظیم، دقت و تطابق بین فرکانس واقعی و سیگنال آنالوگ را تضمین میکند.
در این پروژه این مقدار روی عدد 1 تنظیم شده است.
پارامترهای مربوط به AI1 در درایو Slave
P4-13: حداقل مقدار سیگنال ورودی آنالوگ 1 (AI Curve 1 Minimum input)
حداقل مقدار سیگنال ورودی آنالوگ که توسط درایو شناسایی میشود. این مقدار مبنای نقطه شروع منحنی کنترل است.
در این پروژه این مقدار روی عدد 0 تنظیم شده است.
P4-14: مقدار خروجی متناظر با حداقل ورودی آنالوگ 1 (AI Curve 1 Minimum input corresponding Value)
مقدار خروجی متناظر با حداقل ورودی آنالوگ، معمولاً برابر صفر درصد فرکانس خروجی است تا سیستم در مقدار کمترین سیگنال، موتور را در حالت توقف یا حداقل سرعت نگه دارد.
در این پروژه این مقدار روی عدد 0 تنظیم شده است.
P4-15: حداکثر مقدار سیگنال ورودی آنالوگ 1 (AI Curve 1 Maximum input)
حداکثر مقدار سیگنال ورودی آنالوگ که درایو شناسایی میکند. این نقطه، سقف محدوده کنترل فرکانس است.
در این پروژه این مقدار روی عدد 10 تنظیم شده است.
P4-16: مقدار خروجی متناظر با حداکثر ورودی آنالوگ 1 (AI Curve 1 Maximum input corresponding Value)
مقدار خروجی متناظر با حداکثر ورودی آنالوگ، معمولاً برابر صد درصد فرکانس ماکزیمم است، تا درایو بتواند با افزایش ورودی آنالوگ، فرکانس موتور را به حداکثر مقدار تنظیمشده برساند.
در این پروژه این مقدار روی عدد 100 تنظیم شده است.
نکات ایمنی
- هنگامی که برق دستگاه متصل است به ترمینال های درایو دست نزنید، زیرا خطر برق گرفتگی وجود دارد.
- قبل از برداشتن کاور دستگاه، مطمئن شوید که برق ورودی متصل به منبع تغذیه را قطع کردید.
- قبل از تعمیر، نگهداری و بازرسی حداقل 10 دقیقه پس از قطع برق صبر کنید تا خازن ها دشارژ شوند. سپس اطمینان حاصل کنید که نشانگر CHARGE خاموش است تا از آسیب رساندن به افراد جلوگیری شود.
هشدار ها
- برق سه فاز ورودی را نمی توان به پایانه های خروجی U، V، W وصل کرد.
- حتما چک کنید که تعداد فازهای برق و ولتاژ ورودی با پلاک مشخصات نامی درایو مطابقت داشته باشد.
- برای اتصال کابل اصلی قدرت به ترمینال های درایو از کابلشو با روکش عایق استفاده کنید.
پشتیبانی
در صورت نیاز و بروز هر گونه مشکل، با واحد فنی شرکت پتواز تماس حاصل فرمایید.
شماره تماس و پیام رسان های پشتیبانی واحد فنی پتواز: 09045952007
سپاس از همراهی شما
واحد پشتیبانی فنی و خدمات پس از فروش
شرکت یکسوسازان توان پتواز



