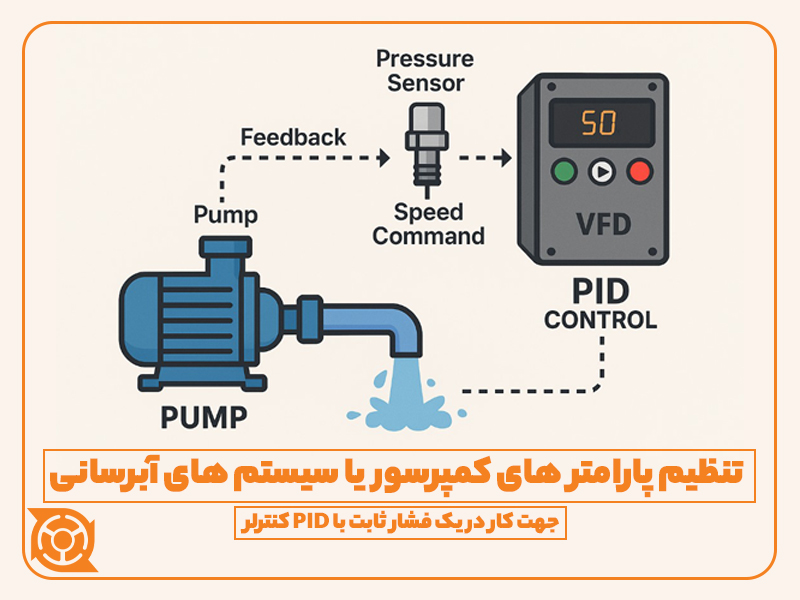
در بسیاری از کاربردهای صنعتی، از جمله سیستم های آبرسانی تحت فشار ثابت یا کمپرسورهای هوای فشرده، کنترل دقیق و پایدار فشار، نقش کلیدی در بهینه سازی عملکرد تجهیزات، افزایش بهره وری انرژی و کاهش استهلاک مکانیکی دارد. یکی از رایج ترین و موثرترین روش ها برای دستیابی به فشار ثابت در این سیستم ها، استفاده از درایو های الکتریکی با قابلیت کنترل PID می باشد.
در این روش درایو با دریافت بازخورد فشار از سنسور (مانند ترانسمیتر 4 تا 20 میلی آمپر یا 0 تا 10 ولت)، سرعت موتور را به صورت پیوسته و متناسب با نیاز سیستم تنظیم می کند. این تنظیمات باعث می شود فشار خروجی در مقدار هدف ثابت بماند.
در این جا پارامتر ها جهت کار کمپرسور یا پمپ آب در فشار ثابت 4 بار تنظیم شده اند و بازه کاری نیز بین 3.5 تا 4.5 بار است. سنسور فشار در نظر گرفته شده در این تنظیم، یک سنسور فشار 0 تا 10 بار با سیگنال خروجی 4 تا 20 میلی آمپر می باشد.
مراحل تنظیم پارامتر های درایو الکتریکی
-
پارامتر های عمومی
- D0-002 = 2: RESET FACTORY
- P6-000: MOTOR RATED POWER
- P6-001: MOTOR RATED VOLTAGE
- P6-002: MOTOR RATED FREQUENCY
- P6-003: MOTOR RATED SPEED
- P6-004: MOTOR RATED CURRENT
- P6-005: MOTOR POLE PAIRS
- P0-002 = 3: MOTOR CONTROL MODE (V/F)
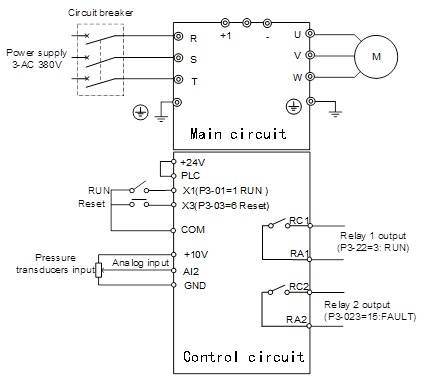
- P0-004 = 2: RUN COMMAND SELECTION (external digital input terminal)
- P0-005=5: SPEED REFERENCE (PID)
- P0-012: MAXIMUM SPEED
- P0-013: MINIMUM SPEED
- P2-001 : ACCELERATION TIME 0
- P2-002 : DECELERATION TIME 0
- P3-001= 3: X1 INPUT FUNCTION (FWD)
- P3-003= 3: X3 INPUT FUNCTION (Reset)
- P3-016= 0: TWO-WIRE / THREE-WIRE CONTROL MODE SELECTION
-
پارامتر های مخصوص PID کنترلر
- PC-000= 1: PROCESS OPEN LOOP AND PROCESS CLOSE LOOP CALCULATION FORMULA (speed reference is PID)
- PC-004= 0: PID MAIN REFERENCE SELECTION (parameter setting PC-010)
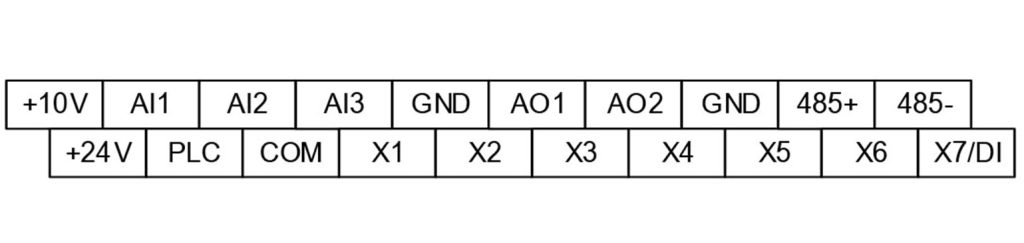
- PC-007= 2: PID MAIN FEEDBACK SELECTION (AI2)
- PC-010= 40%: PID REFERENCE
- PC-011= 10: PROPORTIONAL GAIN P1
- PC-012= 5: INTEGRATION TIME I1
- PC-013= 0: DERIVATIVE TIME D1
- PC-015= 5% : PID DEVIATION LIMIT
نکته
در صورت نیاز، قبل از شروع تنظیم پارامترها می توانید یک بار درایو را به تنظیمات کارخانه بازگردانید. به این منظور نیاز است تا پارامتر D0-002 را روی مقدار 2 تنظیم کنید.
-
پارامتر های عمومی
در ادامه جهت تنظیم پارامتر ها نیاز است که تمامی مراحل را با دقت انجام دهید.
1. در ابتدا باید توجه داشته باشید که جهت تنظیم پارامتر ها نیاز است تا ابتدا وارد منو پارامترها (Parameters) شوید.

- با فشردن دکمه PRG وارد منو تنظیمات شوید.
- از لیست موجود با فشردن دکمه PRG وارد بخش پارامتر ها شوید. در ادامه می توانید جهت ورود به پارامتر مورد نظر خود اقدام کنید.
توجه:
- دقت کنید که دکمه PRG عمل ENTER را نیز انجام می دهد و شما جهت ورود به هر بخش و یا ذخیره مقدار تنظیم شده، می بایست از این دکمه استفاده کنید.
- در تمامی مراحل می توانید با استفاده از دکمه های بالا و پایین در صفحه تنظیمات جا به جا شده و یا مقدار مورد نظر را افزایش و یا کاهش دهید.
- جهت بازگشت به مراحل قبل می توانید از دکمه ESC استفاده کنید.
2. تنظیم روش صدور فرمان راه اندازی (Run Command Selection)
برای تنظیم روش صدور فرمان نیاز است تا پارامتر P0-004 را روی مقدار 2 قرار دهید تا فرمان راه اندازی از طریق ورودی دیجیتال خارجی (External Digital Input Terminal) دریافت شود.
3. تنظیم مشخصات موتور (Motor Parameters)
جهت عملکرد بهینه و برای اطمینان از هماهنگی درایو با موتور، پارامتر های نامی موتور را مطابق مشخصات روی پلاک موتور تنظیم کنید.
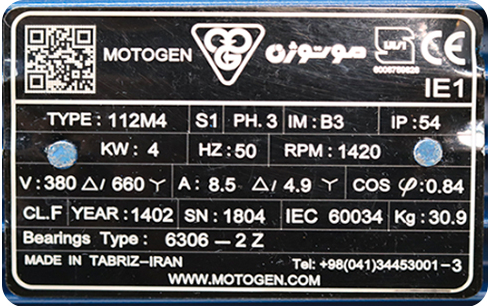
P6-000: توان نامی موتور (Motor Rated Power)
مقدار توان موتور بر حسب کیلووات (در تصویر بالا موتور 4 کیلووات می باشد)
P6-001: ولتاژ نامی موتور (Motor Rated Voltage)
مقدار ولتاژ موتور بر حسب ولت (همانطور که در تصویر بالا مشاهده می شود، مقدار ولتاژ در حالت ستاره 660 ولت و در حالت مثلث 380 ولت می باشد)
P6-002: فرکانس نامی موتور (Motor Rated Frequency)
معمولا 50 یا 60 هرتز بر اساس مشخصات موتور (در تصویر بالا فرکانس 50 هرتز می باشد)
P6-003: سرعت نامی موتور (Motor Rated Speed)
مقدار سرعت نامی موتور بر حسب RPM (در تصویر بالا سرعت نامی 1420 می باشد)
P6-004: جریان نامی موتور (Motor Rated Current)
مقدار جریان با توجه به مشخصات روی پلاک موتور (همانطور که در تصویر بالا مشاهده می شود، مقدار جریان در حالت ستاره 4.9 آمپر و در حالت مثلث 8.5 آمپر می باشد)
توجه: به طور معمول موتور در حالت 380 ولت و 8.5 آمپر در نظر گرفته می شود.
قبل از تنظیم پارامتر ها نیاز است تا یک بار اتوتیون موتور را انجام دهید.
جهت انجام اتوتیون نیاز است تا مقدار پارامتر P6-017 را روی مقدار 1 جهت اتوتیون استاتیک قرار دهید.
- هنگامی که موتور دارای بار است و امکان برداشتن بار از شفت موتور وجود ندارد، می توان از تنظیم خودکار استاتیک استفاده کرد.
- در صورت وجود هر گونه مورد اضطراری، کلیدهای M و STOP را به طور همزمان فشار دهید تا درایو آزادانه متوقف شود.
4. تنظیم و تعیین حالت کنترلی موتور (Motor Control Mode)
- مقدار پارامتر P0-002 را روی حالت V/F تنظیم کنید.
P0-002 = 3: Asynchronous motor V/F control ( V/F حالت کنترلی)
5. تنظیم مرجع سرعت (Speed Reference Selection)
مقدار P0-005 را متناسب با نوع کاربرد تنظیم کنید تا مرجع سرعت به درستی اعمال شود. سرعت درایو می تواند متناسب با نوع کاربرد از مرجع های مختلف مانند صفحه کلید / کیپد Keypad، مودباس Modbus، ورودی آنالوگ Analog Input و … تنظیم شود.
به صورت پیشفرض درایو فرمان افزایش و کاهش سرعت را از کیپد دریافت می کند اما از آنجایی که هدف ما تنظیم سرعت به صورت خودکار توسط PID کنترلر هست، می بایست مقدار این پارامتر روی عدد 5 تنظیم شود.
6. تنظیم زمان های شتاب و کاهش سرعت / شیب راه اندازی
جهت عملکرد صحیح نیاز است تا زمان افزایش و کاهش سرعت به درستی و متناسب با نیاز پروژه تنظیم شود.
P2-001: زمان افزایش سرعت 0 (Acceleration Time 0)
زمان مورد نیاز برای افزایش سرعت موتور از صفر تا حداکثر سرعت (بر حسب ثانیه)
P2-002: زمان کاهش سرعت 0 (Deceleration Time 0)
زمان مورد نیاز برای کاهش سرعت موتور از حداکثر سرعت تا صفر (بر حسب ثانیه)
7. تنظیم ورودی های دیجیتال برای حرکت در جهت جلو و یا در جهت معکوس (راستگرد / چپگرد)
P3-001: تعیین عملکرد ورودی X1 برای حرکت در جهت رو به جلو یا رو به بالا و یا استارت (Forward)
X1 Digital Input Function
این مقدار باید روی عدد 3 تنظیم شود.
P3-003: تعیین عملکرد ورودی X3 جهت ریست کردن (Reset)
X3 Digital Input Function
این مقدار باید روی عدد 6 تنظیم شود.
8. انتخاب حالت کنترل دو سیم و یا سه سیم (Two Wire / Three Wire Control Mode Selection)
جهت انتخاب حالت دو سیم Two wire و یا سه سیم Three Wire نیاز است تا مقدار پارامتر P3-016 را متناسب با نیاز پروژه روی عدد صحیح تنظیم کنید.
کنترل دو سیم: این حالت، حالت لحظه ای می باشد.
کنترل سه سیم: این حالت، حالت دائم کار می باشد.
9. تنظیم محدوده سرعت موتور / فرکانس موتور
P0-012: حداکثر سرعت مجاز / سرعت ماکزیمم (Maximum Speed)
مقدار حداکثر سرعت به صورت پیش فرض 50 هرتز است که با توجه به نیاز پروژه می توان آن را تغییر داد.
P0-013: حداقل سرعت مجاز / سرعت مینیمم (Minimum Speed)
مقدار حداقل سرعت به صورت پیش فرض 0 هرتز است که با توجه به نیاز پروژه می توان آن را تغییر داد.
توجه: با انجام مراحل ذکر شده در بالا پارامترهای عمومی درایو الکتریکی پتواز به درستی پیکربندی خواهد شد. رعایت موارد ذکر شده، عملکرد بهینه و ایمنی سیستم را تضمین می کند.
نکته: در صورت نیاز به تغییرات خاص، می توان پارامتر ها را متناسب با شرایط کاری و نیاز پروژه تنظیم کرد.
-
پارامتر های مخصوص PID کنترلر
توجه: پارامترها در گروه PC زمانی موثر هستند که P0-005 = 5 [PID].
- PC-000: فرمول محاسبه حلقه باز و پردازش حلقه بسته (Process open loop and process close loop calculation formula)
با قرار دادن مقدار این پارامتر روی عدد 1، تعیین می شود که مرجع سرعت PID است.
- PC-004: انتخاب مرجع اصلی PID کنترلر (PID main reference selection)
این پارامتر، انتخاب منبع مرجع اصلی را تعریف می کند.
0 = تنظیم پارامتر (PC−010)
1 = AI1
2 = AI2
3 = AI3
در این تنظیم، مقدار این پارامتر روی عدد صفر تنظیم شده تا مرجع اصلی کنترلر از روی پارامتر P0-010 خوانده شود.
- PC-007: انتخاب فیدبک اصلی PID کنترلر (PID main feedback selection)
انتخاب منبع فیدبک اصلی را تعریف می کند.
0 = None
1 = AI1
2 = AI2
3 = AI3
در این تنظیم، مقدار این پارامتر روی عدد 2 تنظیم شده تا فیدبک اصلی کنترلر از روی ورودی آنالوگ 2 خوانده شود. در صورت نیاز می توانید از دیگر منابع فیدبک نیز استفاده کنید.
- PC-010: مرجع PID کنترلر (PID reference)
مقدار مرجع PID را زمانی که PC−004 = 0 باشد، تعریف می کند.
100.00 %= 100.00% مقدار فیدبک
در اینجا با توجه به شرایط ذکر شده، مقدار این پارامتر روی عدد 40 درصد تنظیم شده است.
- PC-011: بهره متناسب P1
Proportional gain P1
خروجی قسمت بهره متناسب PID Pout = Kp * ε.
این پارامتر میزان واکنش درایو به خطا (اختلاف بین مقدار واقعی و مرجع) را تعیین می کند. هرچه مقدار بالاتر باشد، واکنش سریع تر ولی ناپایدارتر خواهد بود. ( مقدار این پارامتر می بایست با آزمون و خطا و با توجه به شرایط کاری تنظیم شود.)
- PC-012: زمان انتگرال I1
Integration time I1
خروجی قسمت انتگرال PID Iout = Kp * 1/Ti * ∑ε.
زمان انتگرالی بر حسب ثانیه، مقدار زمان لازم برای حذف خطای پایدار را تنظیم می کند. هرچه زمان انتگرال کوتاهتر باشد، مقدار خطای پیوسته سریعتر تصحیح می شود. زمان انتگرال بسیار کوتاه، کنترل را ناپایدار می کند.( مقدار این پارامتر می بایست با آزمون و خطا و با توجه به شرایط کاری تنظیم شود.)
- PC-013: زمان مشتق D1
Derivative time D1
خروجی قسمت مشتق PID Dout = Td * (ε – ε`).
در صورت تغییر مقدار خطا، عملکرد مشتق، خروجی کنترلر PID را افزایش می دهد. هرچه زمان مشتق بیشتر باشد، خروجی کنترلر PID در طول تغییر بیشتر تقویت می شود. این ویژگی برای کنترل دقیق تر و کاهش تاثیر اختلالات در سیستم های دینامیکی اهمیت دارد. ( مقدار این پارامتر می بایست با آزمون و خطا و با توجه به شرایط کاری تنظیم شود.)
- PC-015: حد انحراف PID کنترلر (PID deviation limit)
این پارامتر، انحراف معینی بین فیدبک و مرجع را برای توقف تنظیم داخلی PID و حفظ خروجی پایدار تعریف می کند. تنها زمانی که انحراف بین فیدبک و مرجع از حد انحراف PC-015 بیشتر شود، خروجی به روز می شود. تنظیم حد انحراف باید دقت و پایداری کنترل سیستم را در نظر بگیرد. مقدار این پارامتر با توجه به شرایط ذکر شده روی عدد 5 درصد تنظیم شده است. (با تغییر شرایط، این پارامتر می بایست تغییر کند.)
نتیجه گیری
استفاده از درایو های فرکانس متغیر مجهز به کنترل برداری و قابلیت حلقه بسته PID، راهکاری هوشمند، دقیق و اقتصادی برای کنترل فشار در سیستم های صنعتی و حتی کشاورزی است. با تنظیم صحیح پارامترهای عمومی و PID، می توان سرعت موتور را به گونه ای تنظیم کرد که فشار خروجی سیستم در مقدار مشخصی ثابت بماند و از نوسانات ناخواسته جلوگیری شود.
شماره تماس و پیام رسان های پشتیبانی واحد فنی پتواز : 09045952007
سپاس از همراهی شما
واحد پشتیبانی فنی و خدمات پس از فروش
شرکت یکسوسازان توان پتواز


