کنترل کننده های تناسبی-انتگرالی-مشتقی (PID) یکی از پر کاربردترین الگوریتم های کنترلی در صنعت هستند که به دلیل عملکرد قوی، سادگی عملکردی و انعطاف پذیری در طیف وسیعی از صنایع کاربرد دارند. این کنترل کننده ها در سیستم های حلقه بسته عمل می کنند و با تنظیم مداوم خروجی ها بر اساس تفاوت بین مقدار مطلوب (نقطه تنظیم یا SETPOINT) و مقدار واقعی (متغیر فرآیند)، کنترل دقیقی را بر متغیر هایی مانند دما، فشار، جریان، سرعت و ولتاژ فراهم می کنند.
عملکرد سیستم های کنترلی و تحلیل پاسخ دینامیکی
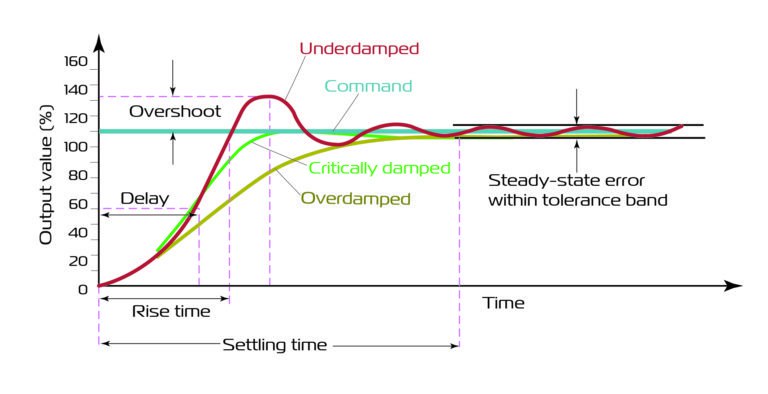
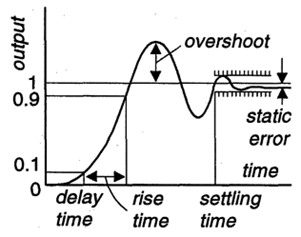
این نمودار رفتار دینامیکی یک سیستم کنترلی را در پاسخ به یک ورودی نشان می دهد.
حالت اول که امکان دارد رخ دهد، Underdamped می باشد که در این حالت سیستم دچار نوسان های متعدد و Overshoot شده و سپس به تدریج به مقدار مطلوب و حالت پایدار می رسد.
حالت دوم که امکان دارد سیستم با آن مواجه شود، Overdamped است که نشان دهنده سیستمی است که بدون هیچگونه نوسان و خطایی اما با سرعت کمتری به مقدار مطلوب و حالت پایدار می رسد.
اما بهترین حالتی که می تواند رخ دهد، Critically Damped است که سیستم بدون نوسان و در کمترین زمان به مقدار هدف و حالت پایداری می رسد. در این حالت است که ما یک کنترلر PID ای داریم که ضرائب مولفه های آن به درستی انتخاب شده اند.
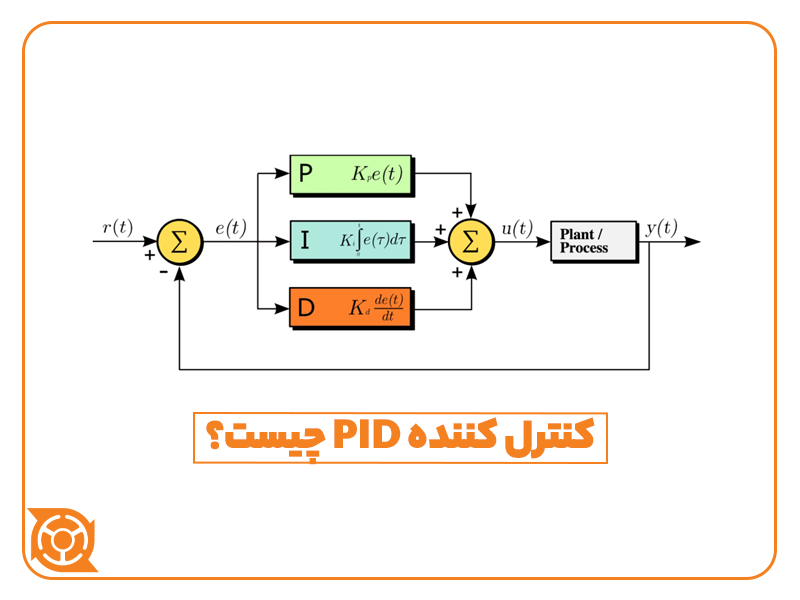
کنترل کننده PID چیست؟
کنترل کننده PID یک مکانیزم فیدبک پیشرفته هست که برای کنترل سیستم های دینامیکی و پویا حیاتیاند. این کنترل کننده ها داده های ورودی را از حسگرها دریافت می کنند، خطا (تفاوت بین مقدار واقعی و نقطه تنظیم) را محاسبه می کنند و خروجی را برای تنظیم متغیرهای سیستم تنظیم می کند. این کنترل کننده از سه مولفه اصلی تشکیل شده است: تناسبی (P)، انتگرالی (I) و مشتقی (D). هر یک از این مولفه ها به طور منحصر به فرد سیگنال خروجی را بر اساس تفاوت بین مقدار مطلوب و مقدار واقعی (خطا) تنظیم می کند تا سیستم را به حالت مطلوب هدایت کنند.
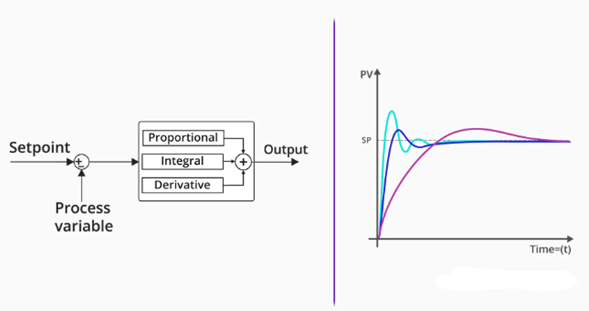
سیستم حلقه بسته
کنترل کننده PID در یک سیستم حلقه بسته عمل می کند که به طور مداوم بازخورد را از حسگرها دریافت کرده و خروجی محرک را در فواصل زمانی منظم (نرخ حلقه ثابت) تنظیم می کند. اجزای اصلی این سیستم عبارتند از:
- متغیر فرآیند (Process Variable): پارامتری که باید کنترل شود، مانند دما، فشار یا نرخ جریان.
- نقطه تنظیم (Setpoint): مقدار مطلوب متغیر فرآیند.
- حسگر (Setpoint): برای اندازهگیری متغیر فرآیند و ارائه بازخورد.
- محرک (Actuator): برای اعمال تغییرات به سیستم.
- اختلال (Disturbance): عوامل خارجی که می توانند متغیر فرآیند را تحت تاثیر قرار دهند، مانند جریان هوای سرد در یک محفظه دمایی.
عناصر کلیدی کنترل کننده PID
- مولفه تناسبی (P): به خطای فعلی پاسخ می دهد و خروجی ای متناسب با اندازه خطا تولید می کند. این مولفه با اقدام اصلاحی فوری، خطاها را به سرعت کاهش می دهد. به عبارتی، این مولفه تنها به تفاوت بین مقدار مطلوب و متغیر فرآیند وابسته است. بهره تناسبی نسبت پاسخ خروجی به خطا را تعیین می کند. افزایش بهره تناسبی سرعت پاسخ سیستم را افزایش می دهد، اما مقادیر بیش از حد بالا می توانند باعث نوسان یا ناپایداری (Overshoot) شوند. اگر فقط به تنهایی از این مولفه استفاده شود و مولفه های انتگرالی و مشتقی استفاده نشوند، ممکن است سیستم دچار خطای حالت پایدار شود که در این حالت همیشه یک مقدار کوچکی خطا وجود خواهد داشت و هیچ گاه سیستم به مقدار مطلوب نخواهد رسید. برای حذف خطای حالت پایدار نیاز است تا حتما از مولفه انتگرالی استفاده شود.
- مولفه انتگرالی (I): این مولفه خطاهای گذشته را جمع آوری کرده و با انتگرال گیری خطا در طول زمان، خطای حالت پایدار (تفاوت دائمی بین متغیر فرآیند و نقطه تنظیم) را به صفر می رساند. با این حال مقادیر بالای بهره انتگرالی می توانند باعث اشباع انتگرال شوند، که در این حالت کنترل کننده، بدون کاهش خطا اشباع می شود.
- مولفه مشتقی (D): این مولفه با ارزیابی نرخ تغییر خطا، رفتار آینده سیستم را پیش بینی می کند و به کاهش نوسانات و فراجهش کمک می کند. بهره مشتق پاسخ را به تغییرات سریع خطا تنظیم می کند، اما مقادیر بالای آن می توانند سیستم را به نویز حساس کرده و ناپایداری ایجاد کنند.
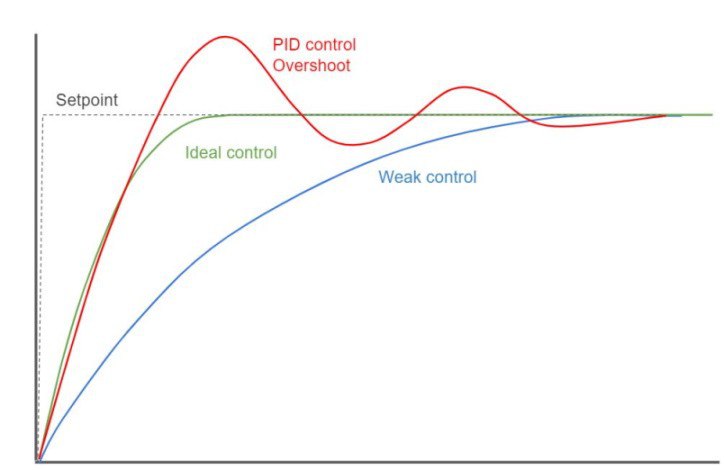
باتنظیم دقیق مقدار این مولفه ها و بهره های آن ها می توان یک کنترل ایده آل داشت، در غیر این صورت امکان Overshoot یا یک کنترل بد و ضعیف وجود خواهد داشت.
در جدول زیر به طور خلاصه تاثیر هر یک از مولفه ها را می توانید مشاهده کنید.

همانطور که مشاهده می کنید، افزایش بهره تناسبی یا Kp باعث کاهش زمان صعود (Raise Time) می شود، مقدار Overshoot را افزایش می دهد، تغییر کمی در زمان نشست (Setting Time) ایجاد می کند، خطای حالت پایدار (Steady-State Error) را کاهش می دهد ولی باعث افت پایداری سیستم می شود.
افزایش بهره انتگرالی یا Ki زمان صعود را کاهش داده ولی همچنان مقدار Overshoot را افزایش می دهد، اما بر خلاف Kp، زمان نشست را افزایش می دهد. با افزایش بهره انتگرالی خطای حالت پایدار به شدت کاهش می یابد، اما همچنان باعث افت پایداری سیستم می شود.
افزایش بهره مشتقی یا Kd یک کاهش جزئی در زمان صعود، Overshoot، و زمان نشست ایجاد می کند. در مقدار خطای حالت پایدار تاثیری ندارد، اما اگر مقدار این بهره یا گین به درستی انتخاب و تنظیم شود، پایداری سیستم بهبود می یابد.
اصطلاحات کلیدی
برای طراحی و ارزیابی سیستم های PID، درک اصطلاحات زیر ضروری است:
- زمان افزایش (Rise Time): زمان لازم برای رسیدن از 10% به 90% مقدار نهایی.
- درصد فراجهش (Percent Overshooting): مقدار بیش از حد متغیر فرآیند از مقدار نهایی، به صورت درصد.
- زمان نشست (Settling Time): زمان لازم برای تثبیت متغیر فرآیند در محدوده ای خاص (معمولا 5%) از مقدار نهایی.
- خطای حالت پایدار (Steady-State Error): تفاوت حالت نهایی بین متغیر فرآیند و نقطه تنظیم.
- عدم پذیرش اختلال (Disturbance Rejection): توانایی سیستم در کاهش اثرات اختلالات.
- پایداری (Robustness): توانایی سیستم در تحمل غیر خطی ها و اختلالات.
- زمان مرده (Deadtime): تاخیر بین تغییر متغیر فرآیند و مشاهده آن تغییر.
- چرخه حلقه (Loop Cycle): فاصله زمانی بین فراخوانی های الگوریتم کنترلی.
نحوه عملکرد کنترل کننده
کنترل کننده PID به صورت زیر عمل می کند:
- محاسبه خطا: تفاوت بین نقطه تنظیم و متغیر فرآیند محاسبه می شود.
- پاسخ تناسبی: خروجی متناسب با خطای کنونی تولید می شود.
- پاسخ انتگرالی: خطاهای گذشته جمع آوری شده و خروجی برای حذف خطای حالت پایدار تنظیم می شود.
- پاسخ مشتقی: نرخ تغییر خطا برای پیش بینی رفتار آینده و کاهش نوسانات محاسبه می شود.
- خروجی کنترلی: مجموعه خروجی های I، P و D به عنوان ورودی به سیستم اعمال می شوند.
- بازخورد یا فیدبک: متغیر فرآیند به طور مداوم اندازهگیری شده و به کنترل کننده بازخورد داده می شود تا خطا به حداقل برسد.
کاربردهای کنترل کننده PID
کنترل کننده PID در طیف وسیعی از صنایع و کاربردها استفاده می شوند:
- کنترل دما: در سیستم های HVAC، کوره ها، یخچال ها و گلخانه ها.
- اتوماسیون صنعتی: کنترل فشار، جریان، سطح و pH در پردازش شیمیایی، تصفیه آب و تولید مواد غذایی.
- رباتیک و کنترل حرکت: تنظیم سرعت، موقعیت و گشتاور در ماشین های CNC، بازوهای رباتیک، و AGV ها.
- کنترل فرآیند: در پالایشگاه های نفت، نیروگاه ها و تاسیسات تصفیه فاضلاب.
- الکترونیک: تنظیم ولتاژ و توان در منابع تغذیه و درایو های موتور.
- سیستم های خودرو: در کروز کنترل، ABS و مدیریت موتور.
- اتوماسیون کشاورزی: کنترل اقلیم و آبیاری در گلخانه ها.
- مهندسی پزشکی: در پمپ های انسولین، انکوباتورها و دستگاه های بیهوشی.
- انرژی های تجدید پذیر: بهینه سازی توان در توربین های بادی و پنل های خورشیدی.
- الکترونیک مصرفی: کنترل دما در فرم ها، یخچال ها و ماشین های لباس شویی.
چشم انداز آینده
این کنترلر ها با پیشرفت فناوری در حال تحول هستند:
- اینترنت اشیاء IOT: ادغام کنترل کننده PID با IOT امکان نظارت از راه دور بر سیستم، تحلیل داده ها و نگهداری پیش بینانه را فراهم می کند.
- کنترل کننده های تطبیقی و خود تنظیم: این کنترل کننده ها پارامتر ها را به طور خودکار بر اساس تغییرات سیستم تنظیم می کنند.
- هوش مصنوعی و یادگیری ماشین: الگوریتم های PID مبتنی بر هوش مصنوعی می توانند رفتار سیستم را پیش بینی کنند و پارامتر ها را بهینه سازی کنند.
- سیستم های کنترلی توزیع شده: در این سیستم ها چندین کنترل کننده با هم در یک شبکه همکاری می کنند تا تحمل خطا و مقیاس پذیری را بهبود بخشند.
شماره تماس و پیام رسان های پشتیبانی واحد فنی پتواز : 09045952007
سپاس از همراهی شما
واحد پشتیبانی فنی و خدمات پس از فروش
شرکت یکسوسازان توان پتواز


